導入
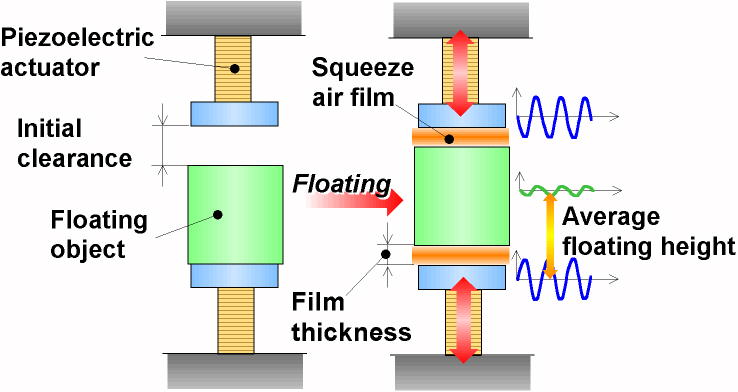
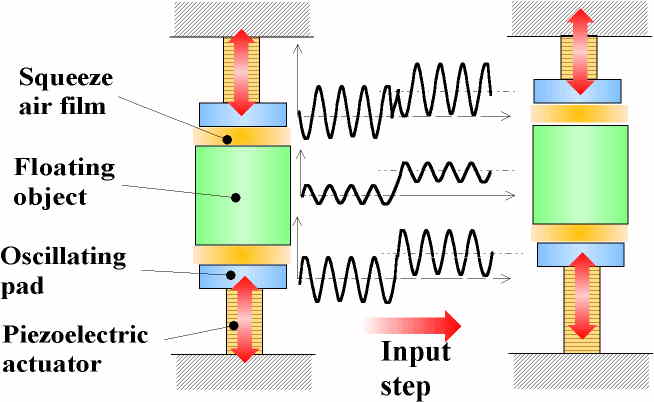
スクイーズ空気軸受とは,対向する2面間(軸-軸受面)の相対的な垂直方向の振動により,すき間内の圧力の平均値が周囲の圧力より高くなる効果(スクイーズ効果)を利用して,回転軸を非接触で支持するものである.また,振動の中心位置を移動させることにより,軸の非接触位置決めも可能となる.
スクイーズ空気膜特性の解析は,このスクイーズ軸受を開発する上で欠かすことができない.特に浮上体の運動を決定するスクイーズ空気膜圧力の特性を把握することは重要である.
本研究では,圧電素子を加振源としてスクイーズ空気膜を発生し,物体の自重を支持するスラスト型スクイーズ空気軸受を用いて,スクイーズ空気膜特性を実験的・理論的に解析し,浮上物体の運動や動的位置決め特性を検討する. 今回は数値解析を容易にするために,スクイーズ空気膜の圧力分布が軸対称(円盤状)となるモデルを用いた.実験装置は,円柱形状の浮上体の上部と下部に,浮上体を挟み込むように振動パッドを対向配置し,圧電素子の高周波駆動によって発生するスクイーズ空気膜により浮上体を支持する.ここでは浮上体が重力方向にのみ運動をするモデルにするため,浮上体のラジアル方向を静圧空気案内によって非接触で支持する.また,数値解析は円形板スクイーズモデルにおいて,レイノルズ方程式をLeeの方法で線形化し,運動方程式をオイラー法で積分することにより行う. 本実験では,下部励振装置のみを駆動した場合と,上下励振装置を駆動した場合で実験を行った.浮上実験では,特に重要な圧力特性に注目して特性試験を行い,スクイーズ空気膜特性を実験的に検討した.また,スクイーズ空気膜による動的位置決め特性の検討も行った.最後に,実験によって得られたスクイーズ空気膜特性と数値解析結果の比較を行い,スクイーズ空気膜特性を実験的・理論的に明らかにする.
実験装置
スラスト型スクイーズ軸受
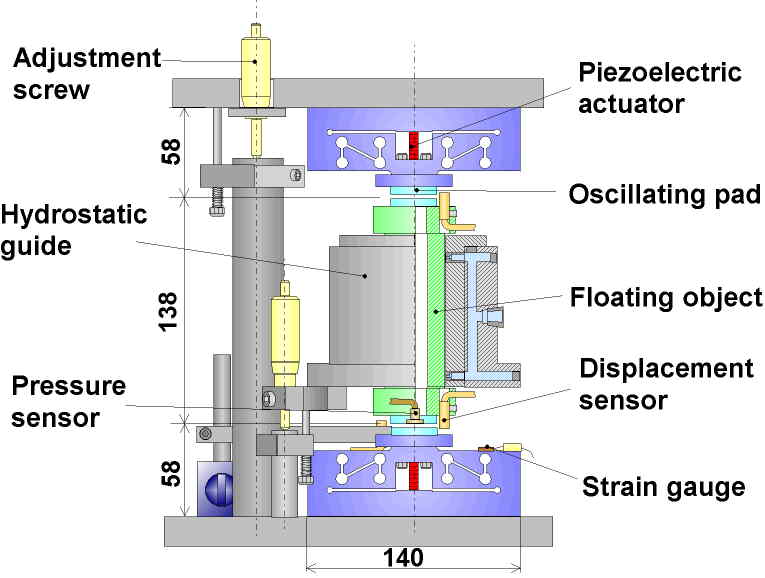
ここでは,スクイーズ空気膜の数値解析を行うための簡易モデルとして,スラスト型スクイーズ軸受を提案する.その概略図を次に示す.このスラスト型スクイーズ軸受は,圧力の分布が軸対称となるので,圧力分布を数値解析で求めることが比較的容易となる.ここに示されるスラスト型スクイーズ軸受は,円柱形状の浮上体の上下から挟み込むように振動パッドが設置され,振動パッドを加振することで発生するスクイーズ膜によって,浮上体の重力方向(スラスト方向)の荷重を非接触で支持することが可能である.浮上体のラジアル方向運動は静圧空気案内により非接触で拘束され,浮上体は重力方向にのみ自由に運動することができる.また,上下振動パッドの振動中心位置を操作することで,スクイーズ空気膜により浮上体の非接触位置決めを行うことが可能である.
実験装置の概要
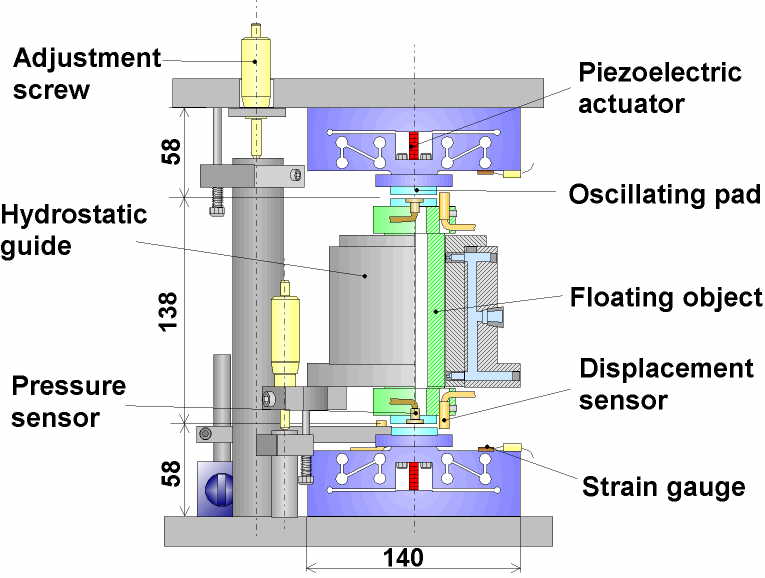
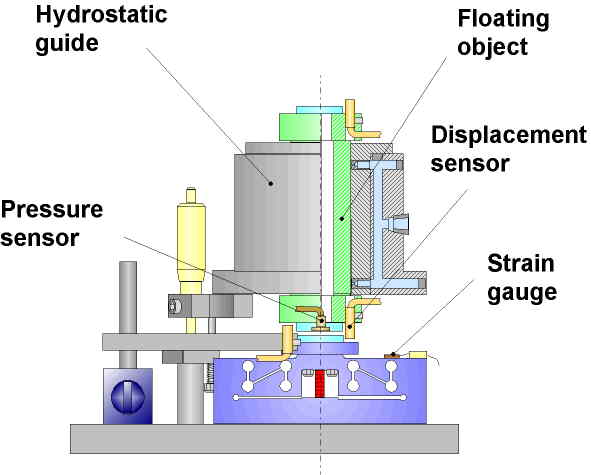
ここでは,実験装置の概要を説明する.下図に示されるように,装置は励振装置と浮上体で構成され,一対の励振装置が浮上体を挟み込むように一直線上に配置された構造になっている.励振装置と浮上体が相対する面にはパッドが取り付けられ,この間に発生するスクイーズ空気膜により浮上体の重力(スラスト)方向の荷重を支持することができる.浮上体は静圧空気案内によって非接触で案内され,浮上体はスラスト方向にのみ移動することができる.またマイクロメータヘッドで構成される調節機構は,パッド間のアライメントを精度2.9″で調節することができる.
実験装置の写真
センサ
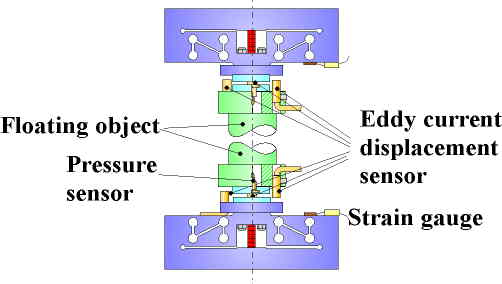
浮上体の各部に取り付けられたセンサについて説明する.
今回浮上体には6個の変位センサが取り付けられている.浮上体上部には3個の渦電流型変位計がパッドの周りに120°間隔(PCD=48mm)で均等に取り付けられ,反対側のパッド取り付け部を測定対象面とすることで,実験前の振動パッド間の初期すき間・角度を測定し,浮上実験ではスクイーズ空気膜の厚さを測定する.浮上体の下部にも上部のものと同じ渦電流型変位計が3個取り付けられており,空気膜の厚さと形状を測定する.また,浮上体の浮上量は絶対座標系で測定するため,定盤に立てられたマグネットスタンドに渦電流型変位計を取り付けることにより,浮上体下部を測定対象面として測定される.
また,浮上体に取り付けられたパッドには,スクイーズ空気膜圧力を測定するために歪ゲージ式圧力センサが埋め込まれている.
そして,平行案内機構である弾性ヒンジには歪ゲージが貼り付けられ,校正をしておくことで振動パッドの振幅を推定することができる.
駆動・測定システム
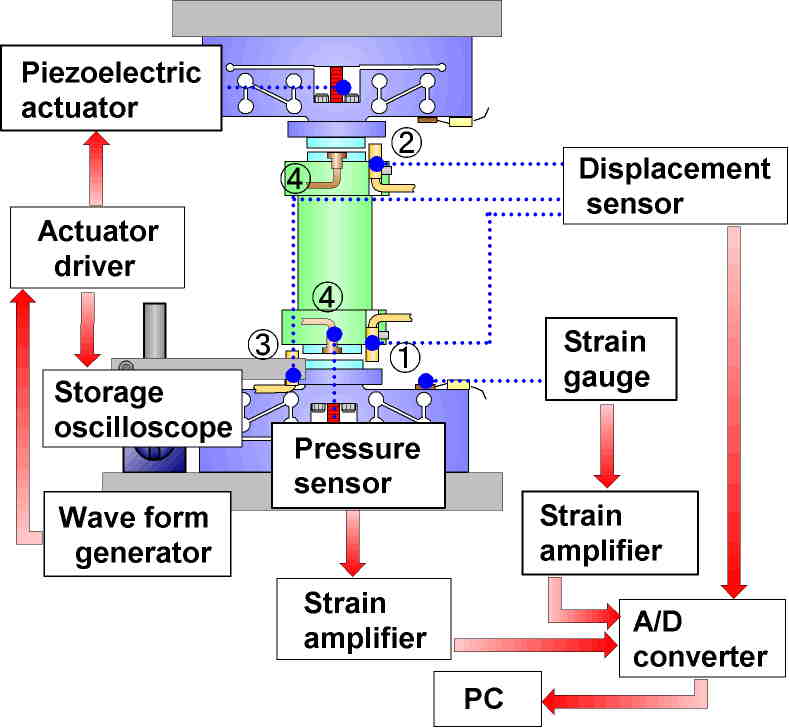
駆動および測定システムを次に示す.ウェーブフォームジェネレータ(日置電機製,7075)から出力される正弦波電圧は,圧電素子用リニアアンプ(エコー電子製,ENP-151U)により増幅され,圧電素子(TOKIN製,NLA-5×5×18)を駆動する.浮上体下部に埋め込まれた3つの渦電流型変位計①(KEYENCE製,分解能:0.4mm)は,振動パッド-浮上体間の相対的な変位を測定する.その結果,2面間の相対位置と姿勢が測定できる.つまり,空気膜の厚さおよび形は,この3点の変位により算出される.浮上体上部に埋め込まれた3個の渦電流型変位計②は振動パッド-浮上体間の初期すき間調整に用いられる.また,マグネットスタンドに取り付けられた渦電流型変位計③は,浮上体の下部を測定対象面として,浮上体の浮上量を測定する.浮上体上部下部に埋め込まれた圧力センサ④(共和電業製,PS-2KB)はスクイーズ膜の圧力を測定し,弾性ヒンジ部に貼られた歪ゲージ(共和電業製,KSN-2-120-E4-11)はパッドの駆動振幅を測定する.測定結果は,A/Dコンバータを介してパーソナルコンピュータにより処理される.
実験
下部励振装置のみの駆動実験
ここでは,上下励振装置を駆動させる前段階として,下部励振装置のみでスクイーズ膜を発生させ,浮上体を浮上させる.浮上体は,自重とスクイーズ空気膜が発生する圧力とがバランスした点でほぼ静止する.このときどのような圧力波形が発生しているのかを調べる.実験装置は下部励振装置と浮上体からなる部分で構成され,その概略図を次に示す.
実験結果(下部のみ)
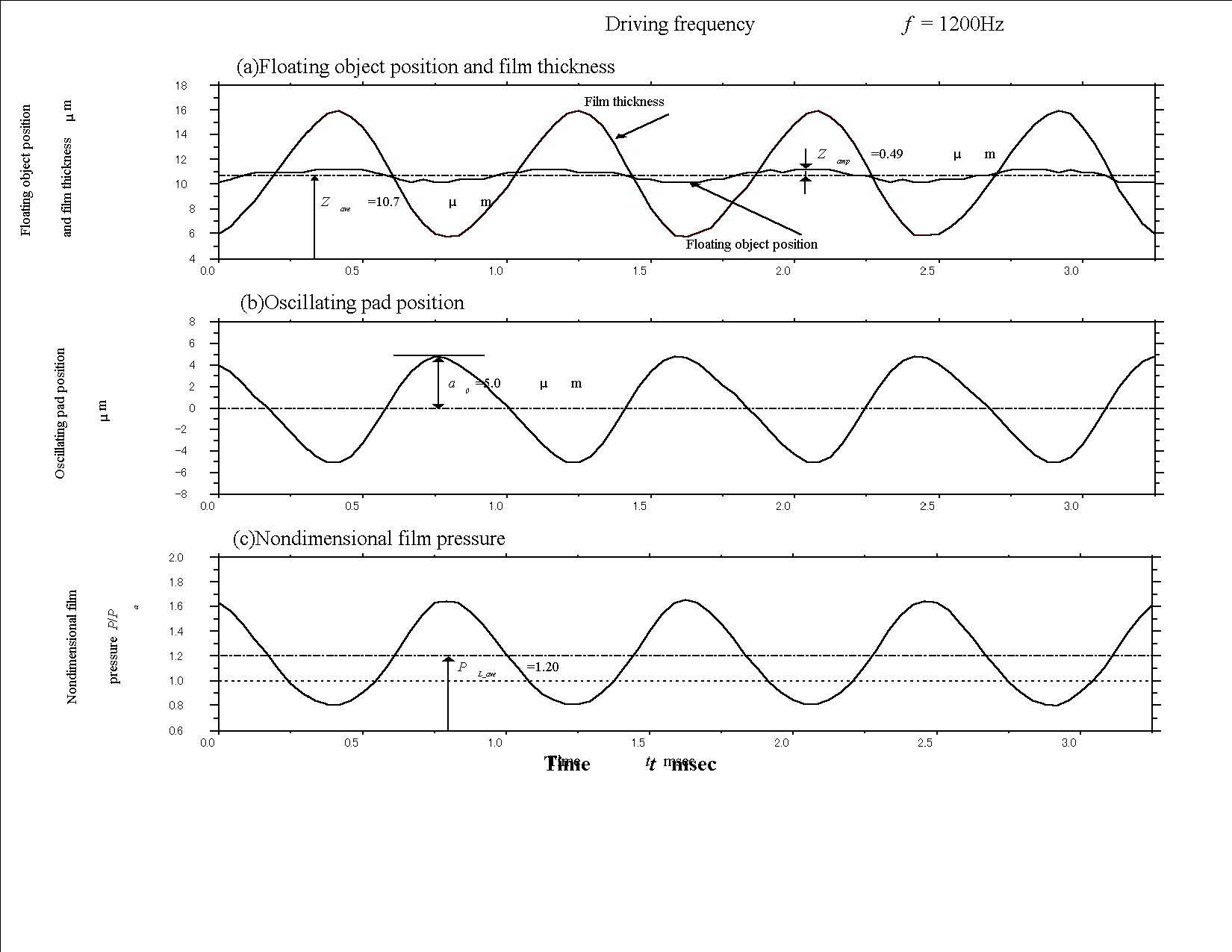
浮上実験はまず,駆動周波数f=1200Hz,駆動振幅a0=5.0mmの条件で行った.その実験結果を図4.3に示す.図4.3に示されるように駆動振幅a0にともない,空気膜の振幅hamp=5.0mm,平均膜厚have=10.8mmの正弦波状のスクイーズ空気膜が発生し,浮上体を非接触で支持できていることが確認できる.また,浮上体は平均浮上量zave=10.7mmで浮上し,浮上体の振幅zampが駆動周波数に同期し0.49mm発生していることが確認できる.パッドの中心のスクイーズ空気膜の圧力変動は駆動振幅と同位相で振幅し,無次元平均膜圧力Pl_ave=1.20と周囲圧(Pa)より高いことが確認できる.無次元平均膜圧力はセンサ部分の無次元圧力値を時間的に平均して算出している.
上下励振装置の駆動実験
ここでは,上下の励振装置を駆動することで浮上体を支持し,発生するスクイーズ空気膜の特性の検討を実験的に行う.実験の概略図を次に示す.
実験結果(上下)
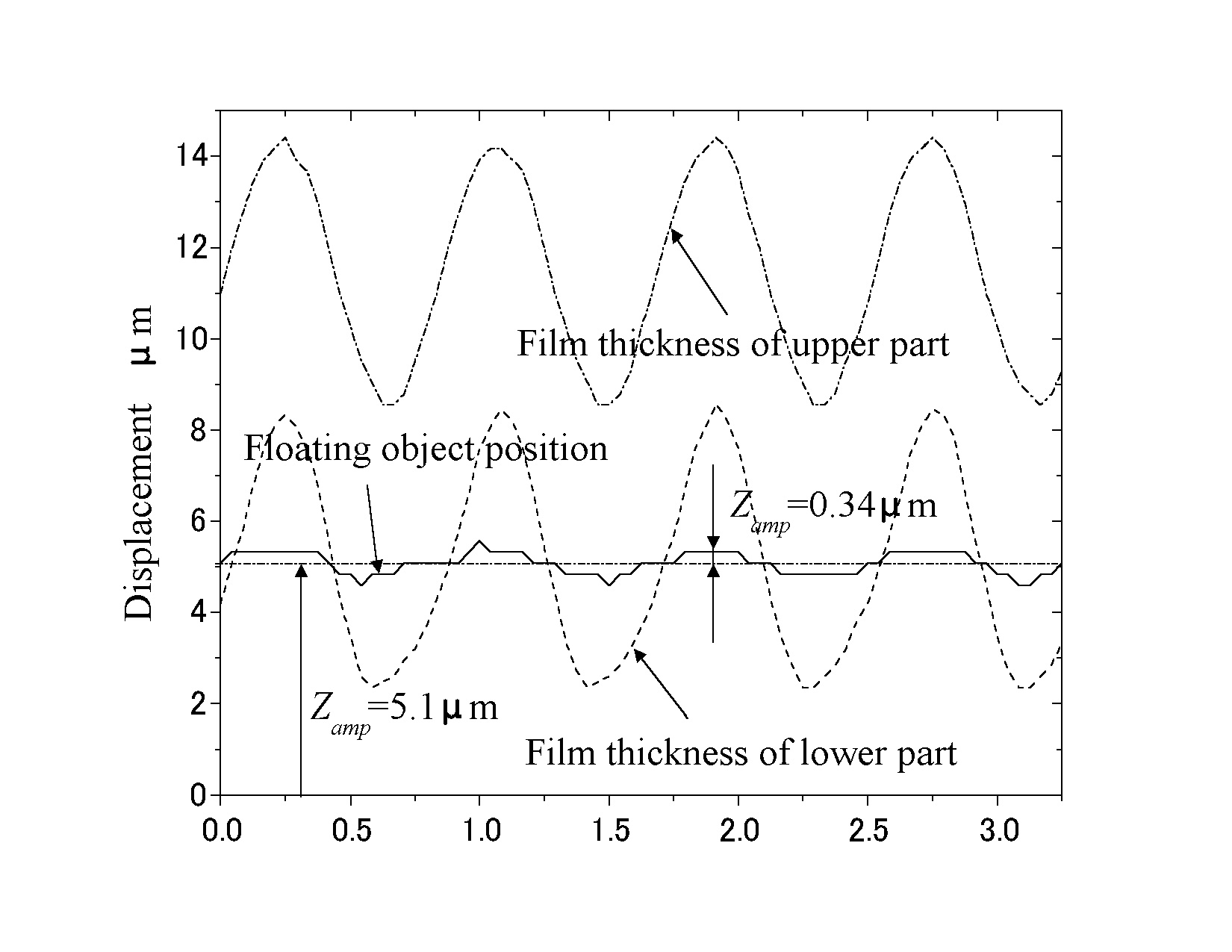
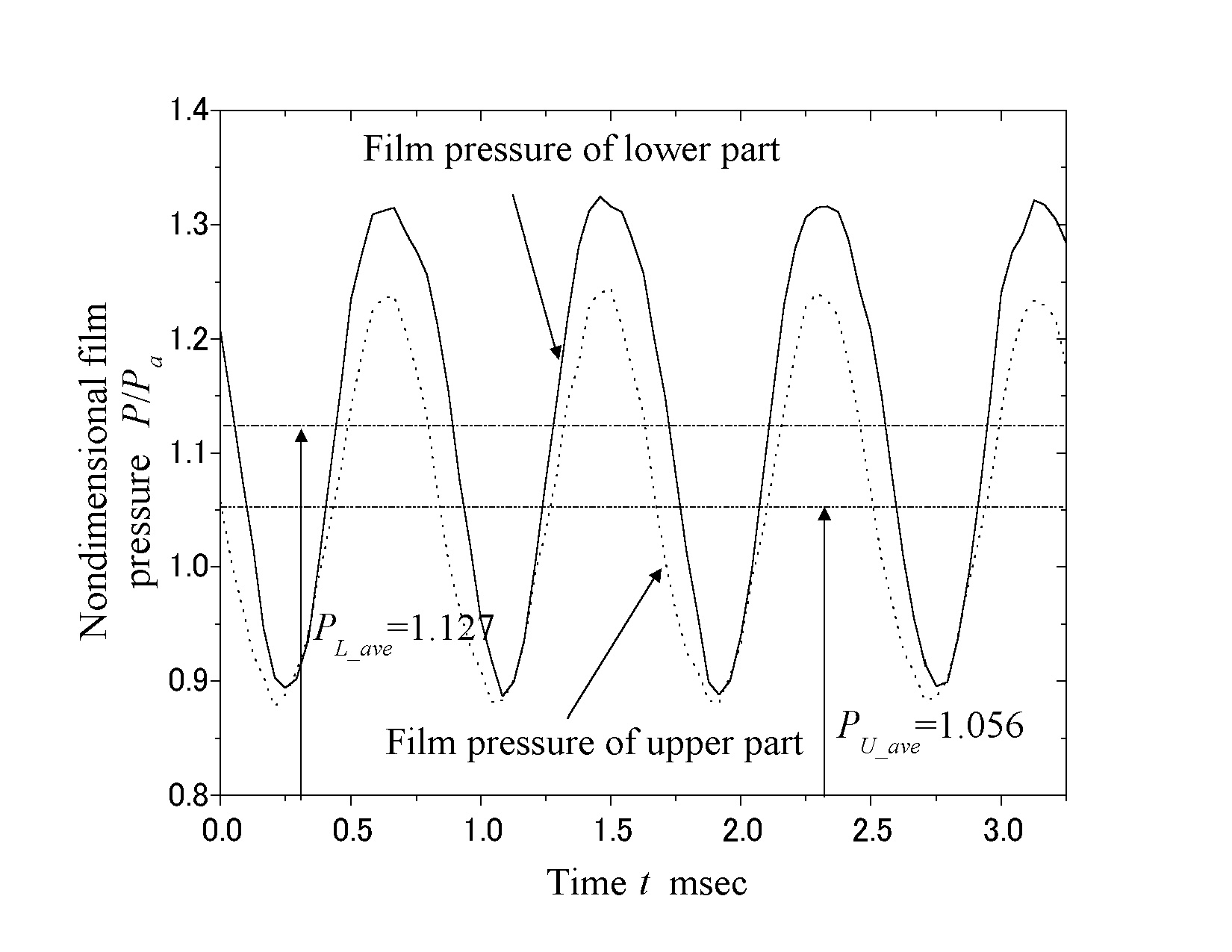
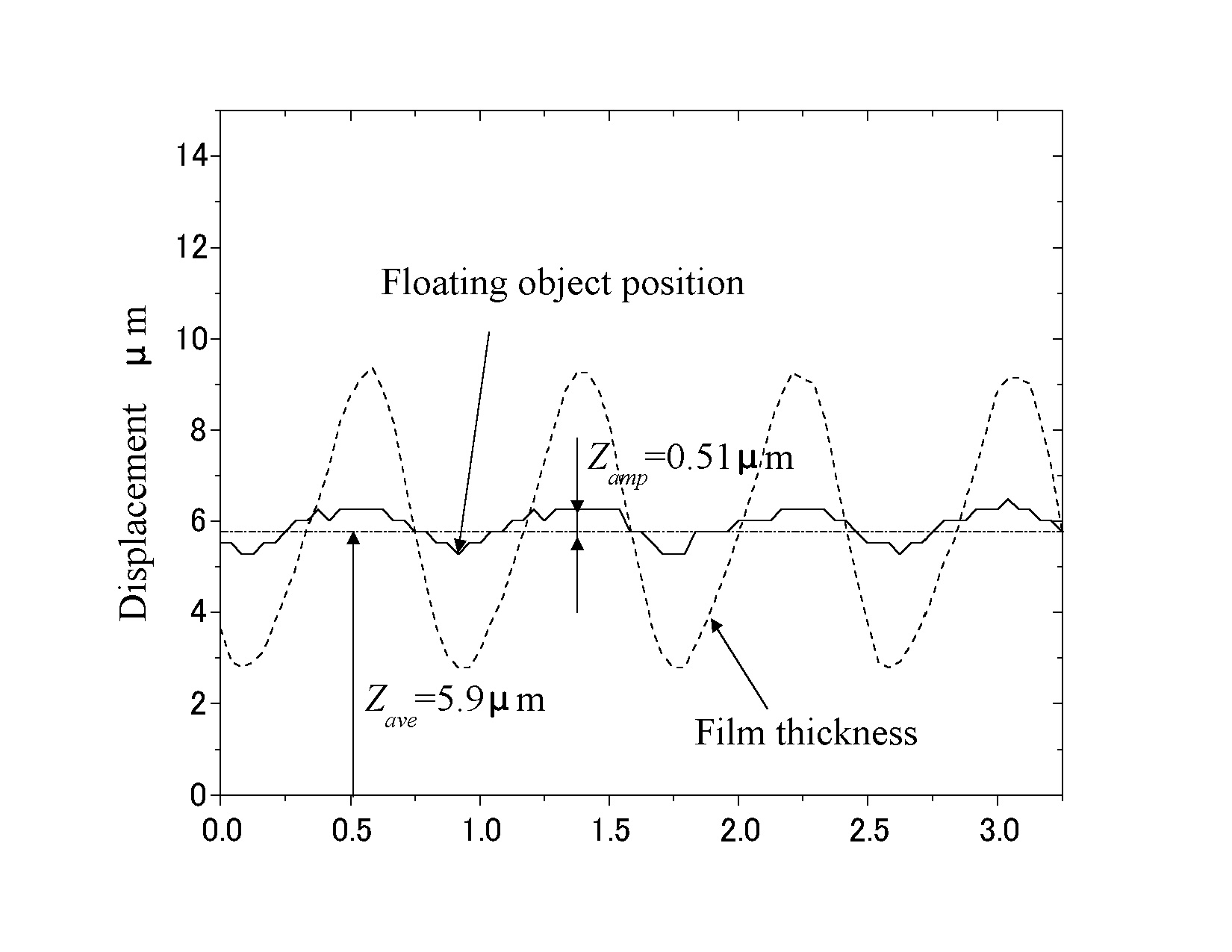
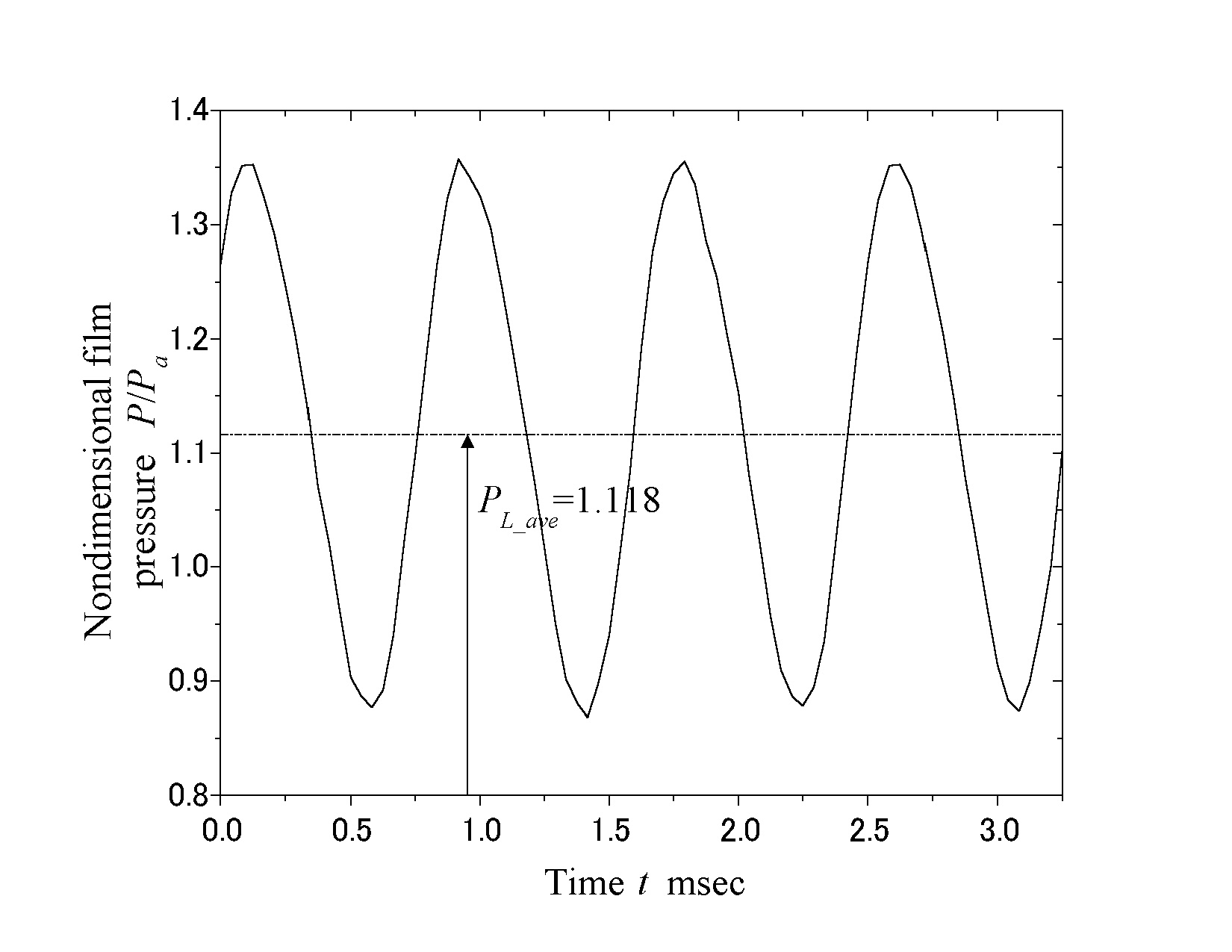
浮上実験はまず,駆動周波数f=1200Hz,駆動振幅a0=3.0mm,初期すき間c0=16.0mmの条件で行った.その実験結果を次に示す.また,駆動周波数f=1200Hz,駆動振幅a0=3.0mmの同条件で,上部振動パッド間にスクイーズ膜が発生しないように初期すき間を十分に空け,下部励振装置のみを駆動させて行った実験の結果を下図に示す. 図に示されるように,正弦波状の駆動振幅a0=3.0mmにともないスクイーズ空気膜が発生し,浮上体を非接触で支持していることが確認できる.浮上体は平均浮上量zave=5.1mmで浮上し,浮上体の振幅zamp=0.34mmである.また,浮上体下部に無次元平均膜圧力Pl_ave=1.127,浮上体上部に無次元平均膜圧力Pu_ave=1.056,が発生していることがわかる.また,下部励振装置のみを駆動させた場合と比較すると,上下で振動させた場合平均浮上量zaveが5.9mmから5.1mmに,浮上体の振幅zampが0.51mmから0.34mmに減少していることが確認できる.これは,スクイーズ空気膜が浮上体の上部にも発生し,その圧力によって浮上体は下方に押さえつけられるため,下部だけを振動させた場合より平均浮上量zaveが減少するものと考えられる.上下にスクイーズ空気膜が発生した場合,浮上体の振幅zampは上下逆位相の空気膜による圧力で押さえつけられるため減少すると考えられる.また,浮上体下部の無次元平均膜圧力Pl_aveは浮上体上部にも圧力が発生したために,Pl_ave=1.118からPl_ave=1.127,に増加していることがわかる.
ステップ応答
ここでは,浮上体がスクイーズ空気膜により支持されている状態で,振動パッドにステップ入力を行ったときの浮上体の運動について調べる.次にステップ応答実験の概略図を示す.対向に配置され逆位相で振動する振動パッドに対し,同時同方向に同量のオフセットをかけることで位置決めを行い,浮上体の動的位置決め特性を実験的に検討する.
実験結果(ステップ応答)
圧電素子に同波形のステップ入力を行ったときの,浮上体の運動の再現性が確認された.
振動パッドに入力するステップ波形の,変位ステップ幅zs ,位相θ,オフセット時間To ,ステップ方向および上下励振装置の初期すき間c0を調整することで,浮上体の動的位置決め特性を変化させることができることが明らかになった.
数値解析
数値解析方法
次に示すモデルにおいて,浮上体の運動およびスクイーズ空気膜圧力の解析を行う.
数値解析は円形板スクイーズモデルにおいて,レイノルズ方程式をLeeの方法で線形化し,運動方程式をオイラー法で積分することにより行う.
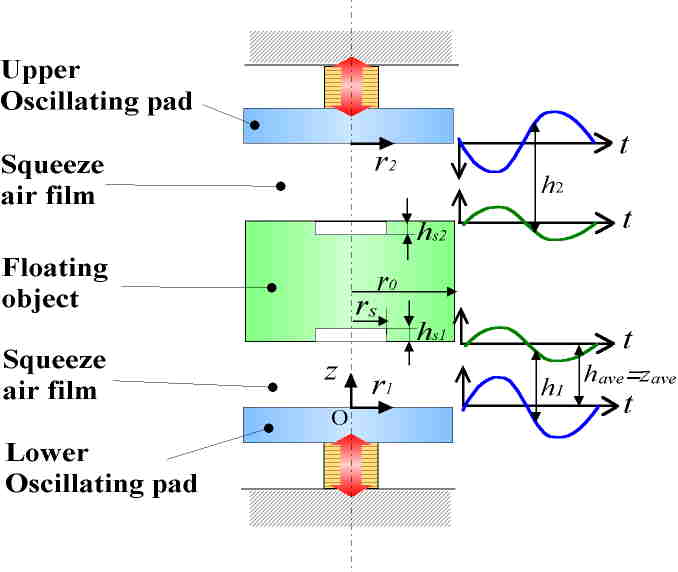
浮上体は円柱状であり,加振面は正弦運動をしている. 解析に用いる主な仮定は,
(1) 浮上体は加振面と常に平行で,鉛直方向に自由に運動できる.
(2) 圧力分布はz軸を中心とした軸対称な分布となる.
(3) 膜内空気は粘性が支配的で慣性は無視する.
(4) 現象は等温的である.
(5) 現象は定常周期的である.
とする.
ここで,気体自身の慣性力が振動パッド間の気体の流動に対して支配的な役割を果たすようになるのは,振動パッド面の速度の値が音速のオーダになる場合であり,もし浮上量が10mmとしても駆動周波数5MHzとなるので,本研究で扱っているスクイーズ軸受においては気体の慣性力は十分無視できると考えてよい.
数値解析結果
ここでは,特にスクイーズ空気膜圧力の圧力分布に関する数値解析結果について述べる.
今回用いた実験装置では,圧力センサの測定面をパッドと同一平面上に埋め込むことが物理的に困難であり,結果的にパッド面に対し,下部センサでhs=3~8mm,上部センサでhs=0~20mmほどの段差(凹部)が生じた.ここでは,この段差がスクイーズ空気膜の圧力測定に与える影響を数値解析によって求めた.
駆動周波数f=1200Hz,駆動振幅a0=5.0mmの実験条件のもと,圧力センサ部の段差を0~50mmまで変化させた数値計算結果を下図に示す.
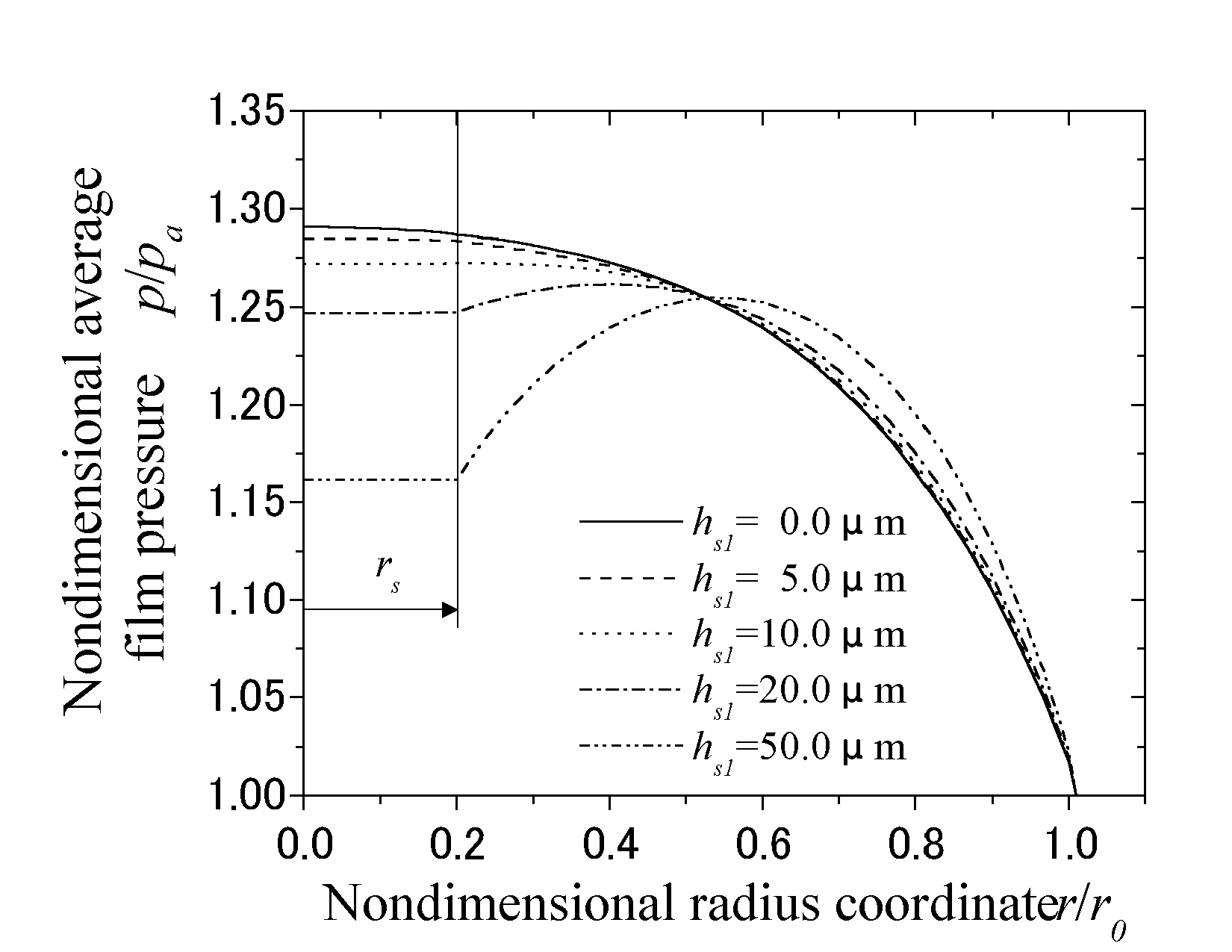
横軸は無次元半径方向座標,縦軸は無次元平均圧力を表す.これより,センサ部の平均圧力はhs=0mmに対して,hs=5mmでは1.8%,hs=10mmでは6.4%,hs=20mmでは17.2%,hs=50mmでは79.4%減少していることが確認された.下部センサに対してはそれほど影響がないことがわかるが,上部センサに対しては約20%の誤差が存在している.よって,実験結果と数値解析結果を比較する際には,段差を考慮した数値解析を行う.また,これより,圧力センサを段差hs=10mm以内にしてパッドに埋め込むことができれば,圧力測定はこの段差にほとんど影響されないことが分かる.
下図に圧力分布の周波数特性を示す.
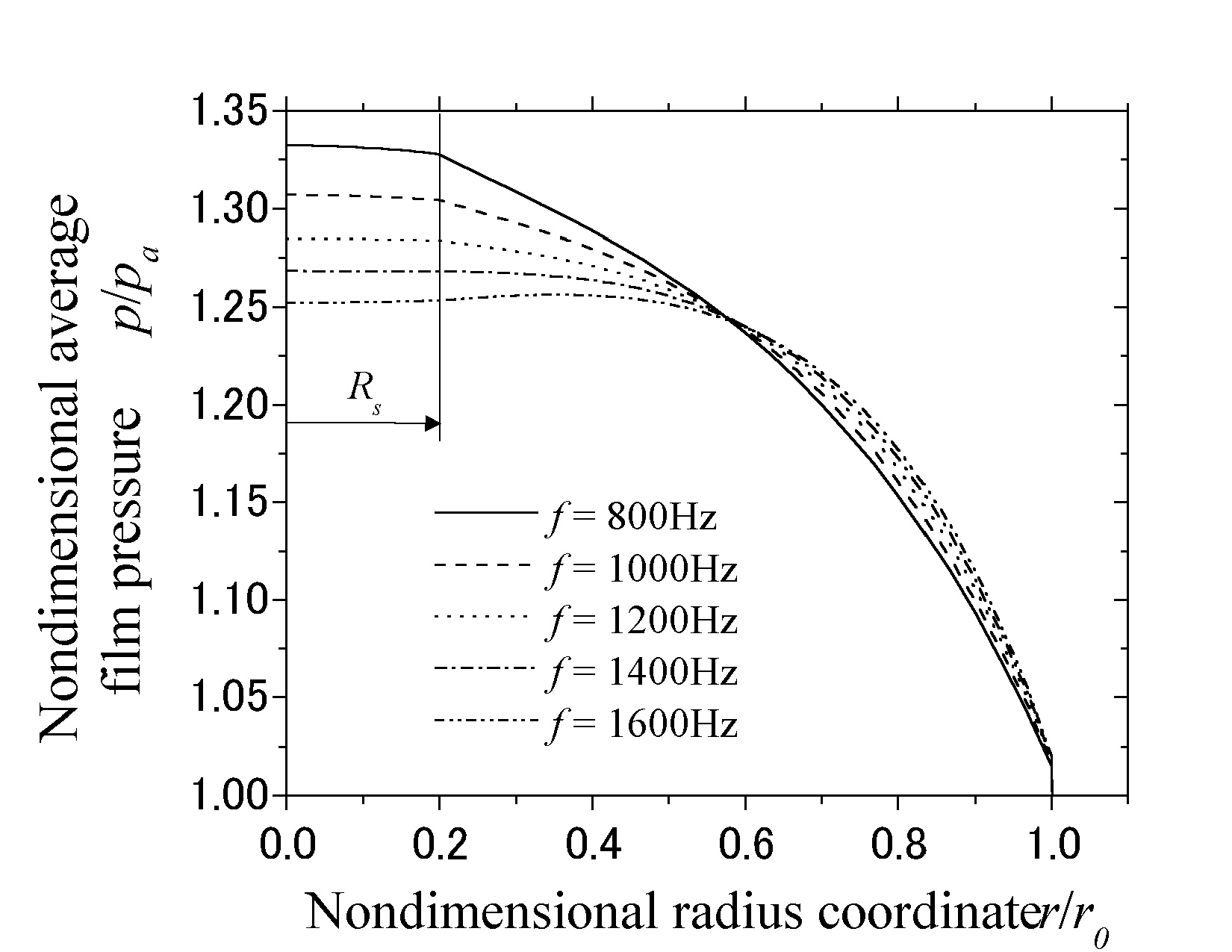
これより,駆動周波数を増加するのに伴って,パッド中心付近の圧力値は減少し,パッド端面付近の圧力値は増加することがわかる.この理由は,駆動周波数を増加するとスクイーズ効果が大きくなり,パッド端面付近の空気の出入りが高速され,圧力分布が半径方向に対して均等になっていくためであると考えられる.本実験装置では,圧力センサはパッドの中心部分にのみ設置されており,パッド内の他の部分の圧力を測定することはできない.よって,実験結果と数値解析結果を比較する際には,圧力センサ部分の圧力のみを取り扱う.
実験結果と数値解析結果の比較
ここでは実験結果と数値解析結果を比較し,発生したスクイーズ空気膜の圧力特性について検討する.
下図では,駆動振幅a0=3.0~6.0mmにおける駆動周波数-平均膜圧力の関係を実験結果と数値解析結果について比較した.駆動は下部励振装置のみで行っている.
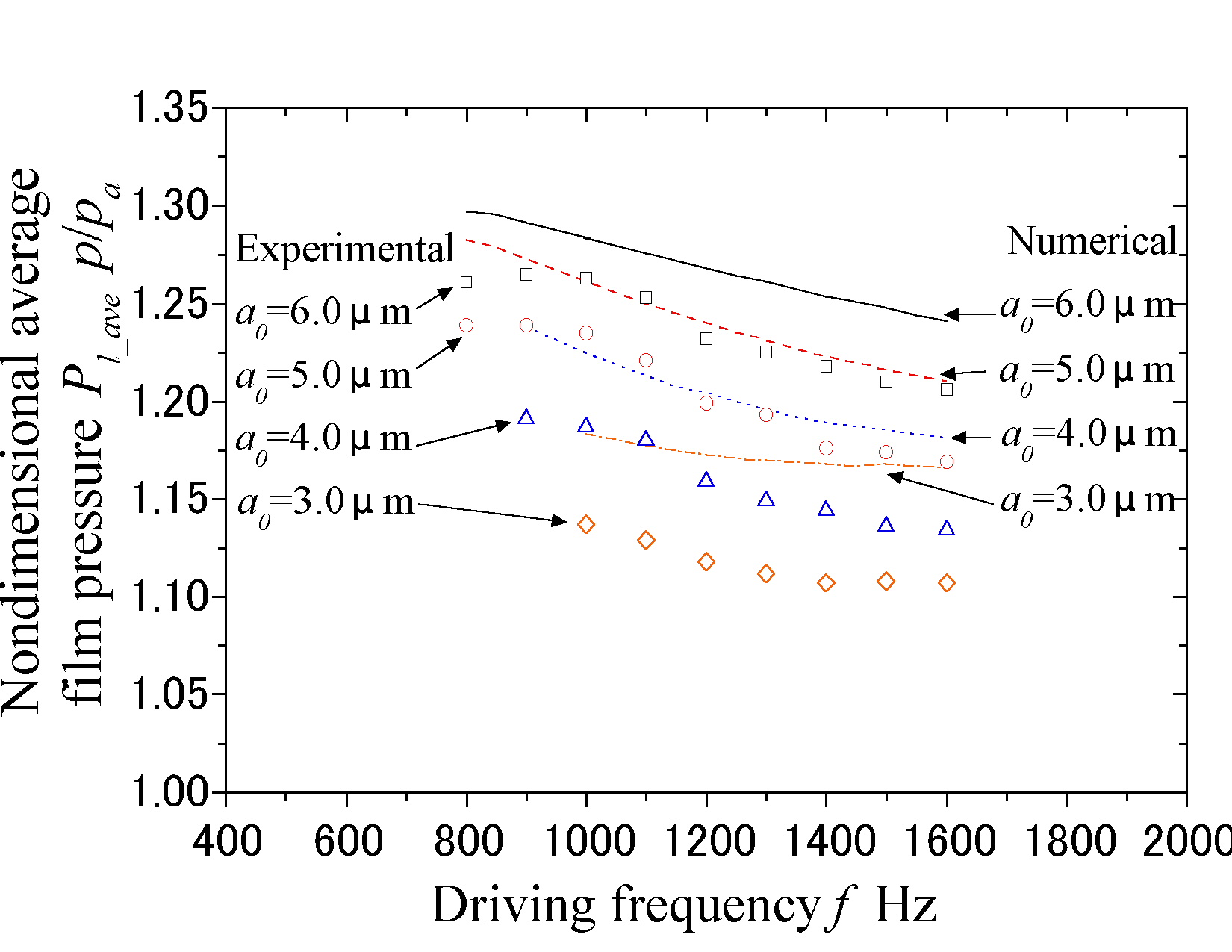
これより,平均膜圧力は駆動振幅の増加に伴って増加し,駆動周波数の増加に伴って減少することが実験結果,数値解析結果の両方で確認できる.また,実験結果と数値解析結果は,駆動振幅の増加および駆動周波数の減少に伴い,近づく傾向にある.浮上量は駆動振幅に比例するので,言い換えると,スクイーズナンバσの減少に伴って実験結果と数値解析結果は一致の方向に向かう.実験結果と数値解析結果の誤差は最大で55.1%,最小で7.1%であった.下部励振装置のみの駆動においては,定性的に,または定量的にも一致しているといえる.
次に上下励振装置駆動における空気膜圧力特性の実験結果と数値解析結果の比較を示す.
下図は下部スクイーズ空気膜に対する結果である.
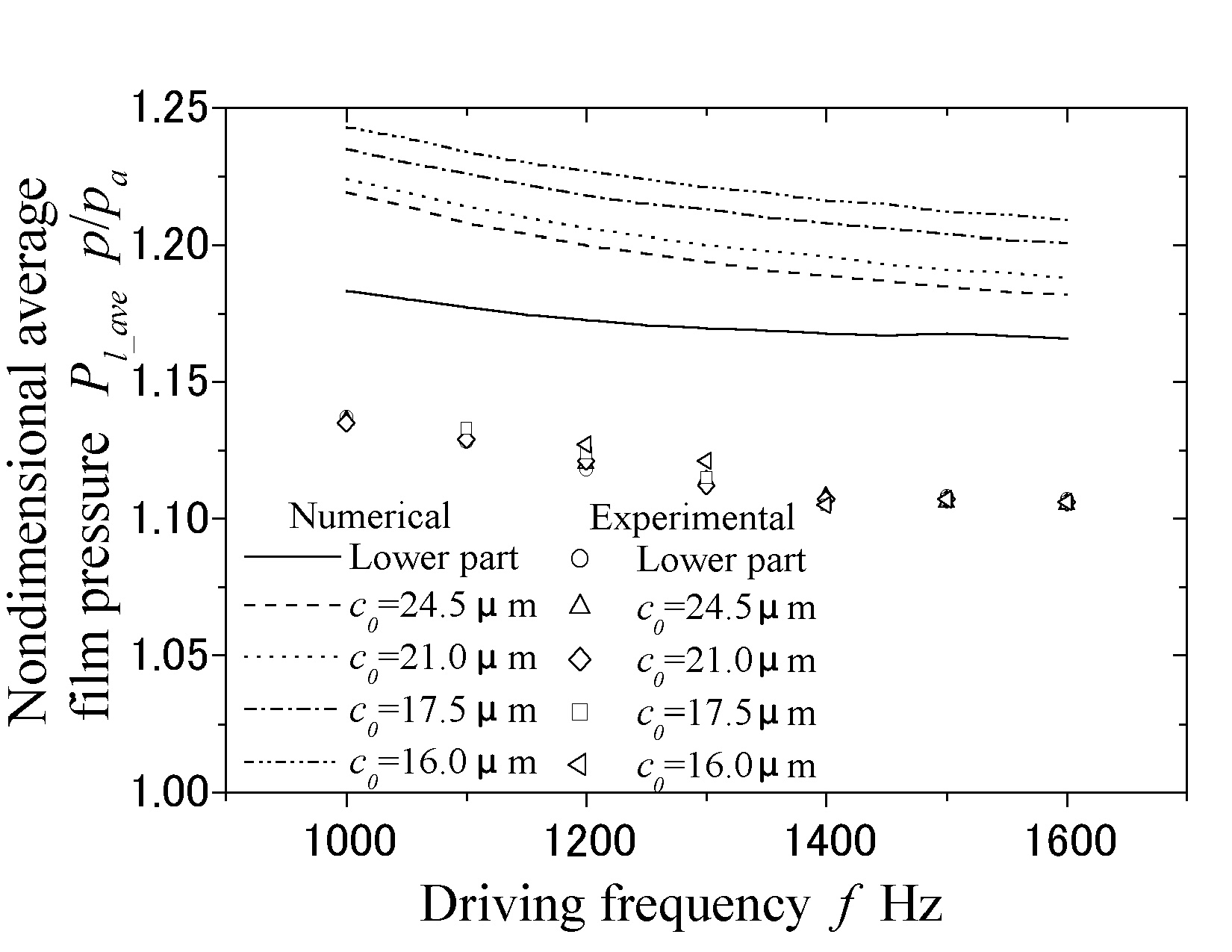
数値解析結果では,初期すき間c0が減少するのに伴って,平均膜圧力は増加しているが,実験結果では,初期すき間c0の変化に対してほとんど違いは表れていない.この原因として,今回の実験において初期すき間c0=16.0mm 未満で浮上体を浮上させることができなかったことが関係していると考えられる.十分なすき間が存在するのに浮上することができなかった理由として,二組のパッド間のアライメントが狂っている可能性が上げられる.パッド間のアライメントが一致していなければ十分なスクイーズ膜を形成することができない.また,実験結果と数値解析結果において,駆動周波数が増加するのに伴って,平均膜圧力は減少する傾向で一致している.
下図は上部スクイーズ空気膜に対する結果である.
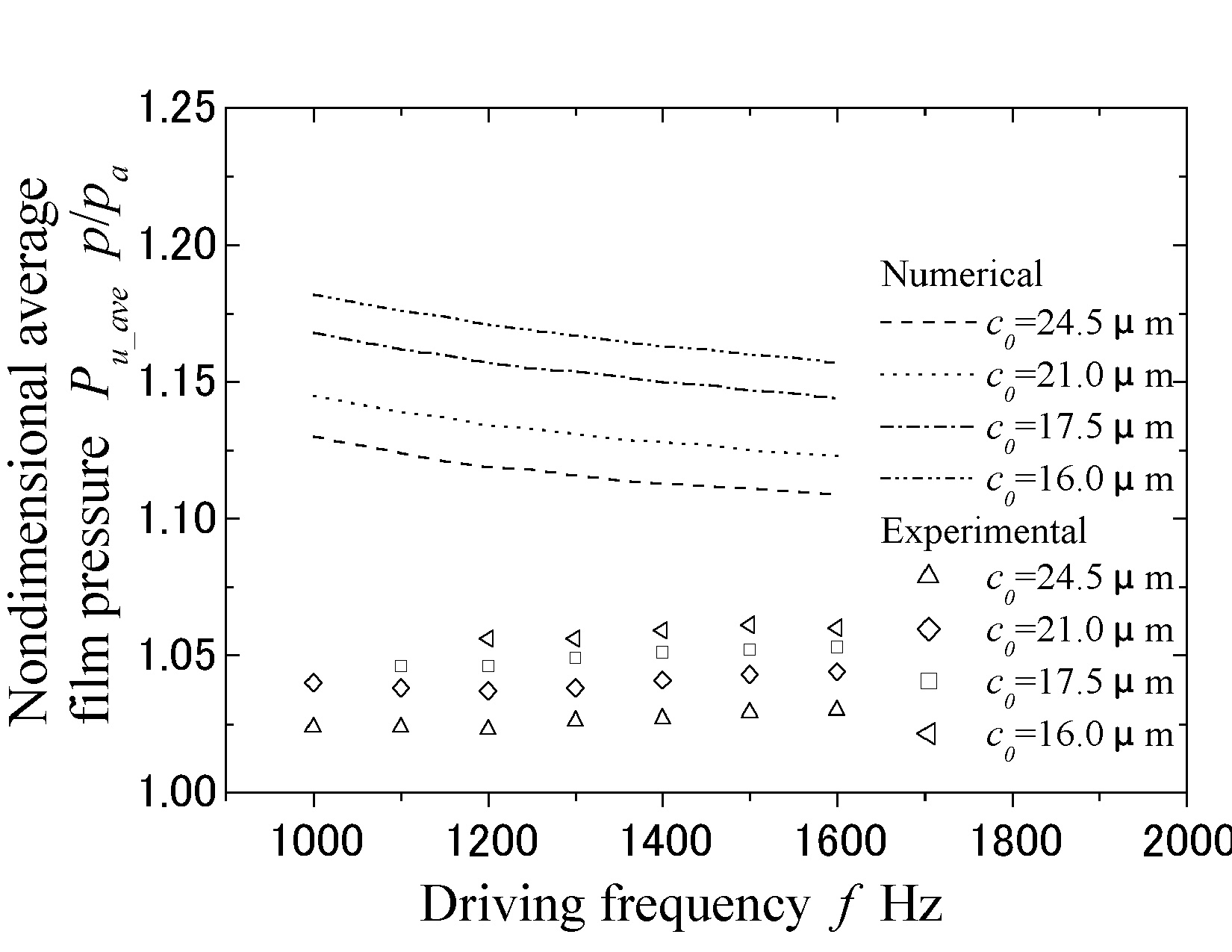
初期すき間c0が減少するのに伴って,平均膜圧力が増加する点では,傾向の一致を確認することができるが,誤差は最大で541.7%となっており,数値解析を用いて上部スクイーズ膜の圧力特性を定量的に予測することは困難であった.
まとめ
本研究ではスクイーズ空気膜の特性を明らかにするために,スラスト型スクイーズ軸受を用いて,特に圧力特性に注目して,実験的・理論的にスクイーズ空気膜特性の解析を行った.また,スクイーズ空気膜に支持される浮上体の動的位置決めを検討した.
スラスト型スクイーズ空気軸受において質量1.39kgの浮上体を浮上させ,無次元平均膜圧力Pl_aveを測定することが可能であった.また,数値解析を用いて,下部励振装置のみ駆動の時には,スクイーズ空気膜圧力特性が定性的・定量的に推察可能であることが確認できた.浮上体の動的位置決め特性を検討し,より積極的な位置決めの可能性を示した.