 |  |
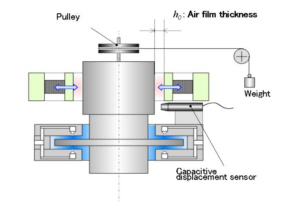
 剛性の測定方法
剛性の測定方法 | |
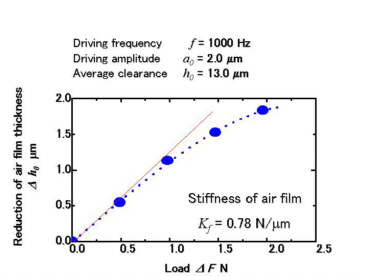
スクイーズ空気膜の剛性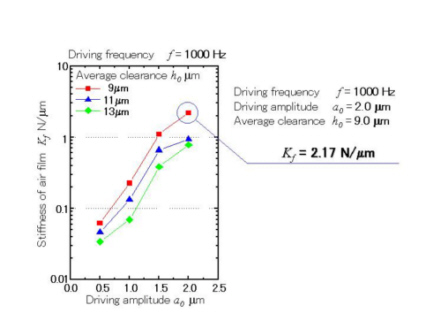
|
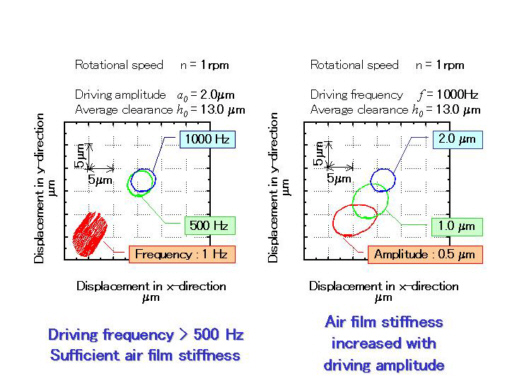
駆動周波数を変化させた場合 左の図は、駆動振幅が2.0μmで一定とし、 駆動周波数を1、500、1000Hzと変化させた場合の心振れです。 1Hzでは空気膜が発生しておらず、接触しながら軸が振れまわっています。 500Hzでは、空気膜の発生によって心振れが減少しています。 また、500Hz以上では心振れはあまり変化しなくなりました。 |
駆動振幅を変化させた場合 右の図は、駆動周波数が1000Hzで一定とし, 駆動振幅を0.5、1.0、2.0μmと変化させた場合の心振れです。 駆動周振幅が小さいと発生する膜の剛性は低く、大きく触れ回りますが、 振幅の増大に連れ、膜の剛性が大きくなり、触れ回りが小さくなっています。 |
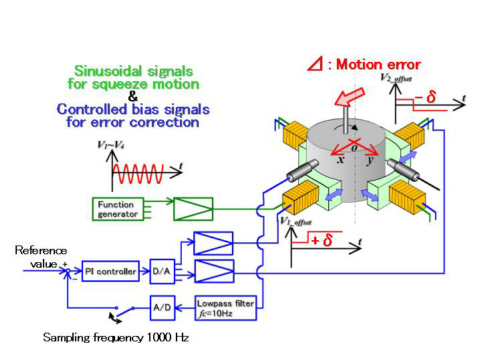 位置決め制御
位置決め制御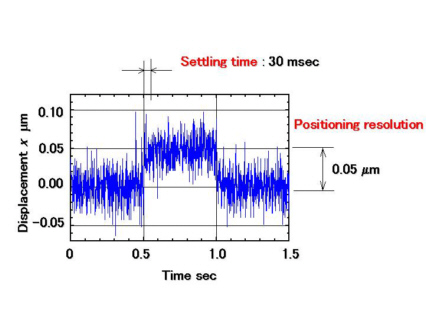 運動誤差補正
運動誤差補正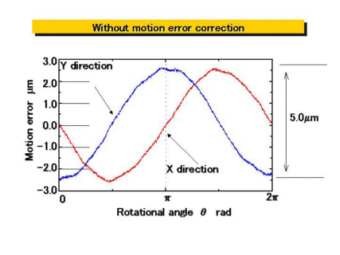 | 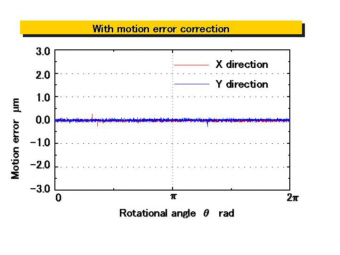 |
|
運動誤差補正前 こちらに補正前の運動誤差を示します。 縦軸は軸の変動、横軸は回転角度です。 図中赤がX方向、青がY方向です。 軸の変動は週回数によらず一定で 一回転中に約5μm振れ回っています。 これは偏心成分に起因する心振れです |
運動誤差補正後 こちらが運動誤差の補正結果です。 x、y方向両方とも約5μmあった運動誤差は 0.05μm以内に収めることに成功しました。 この結果より、偏心成分に起因する運動誤差は完全に補正することができました。 |